

我国正在研发六足登月机器人,即使遇到坏腿的情况也能自如行走。这一科技探索之旅充满神奇,展示了未来科技的无限潜力。这一机器人将有助于提高我国太空探索的能力,为未来的登月任务提供重要支持。
本文目录导读:
随着科技的飞速发展,人类对太空的探索愈发深入,在这个伟大的探索时代,我国正致力于研发一款六足登月机器人,这款机器人不仅拥有强大的功能,更具备即使在一条腿受损时也能正常行走的惊人能力,本文将为您详细介绍这一科技奇迹的背后故事,带您走进未来科技的神奇之旅。
六足登月机器人的研发背景
随着人类对月球的探索需求日益增长,登月机器人成为了太空任务中的关键角色,六足登月机器人作为一种新型的月球探测设备,具有高度的适应性和灵活性,我国科研团队经过不懈努力,成功研发出这款具备独特优势的机器人。
六足机器人的特点
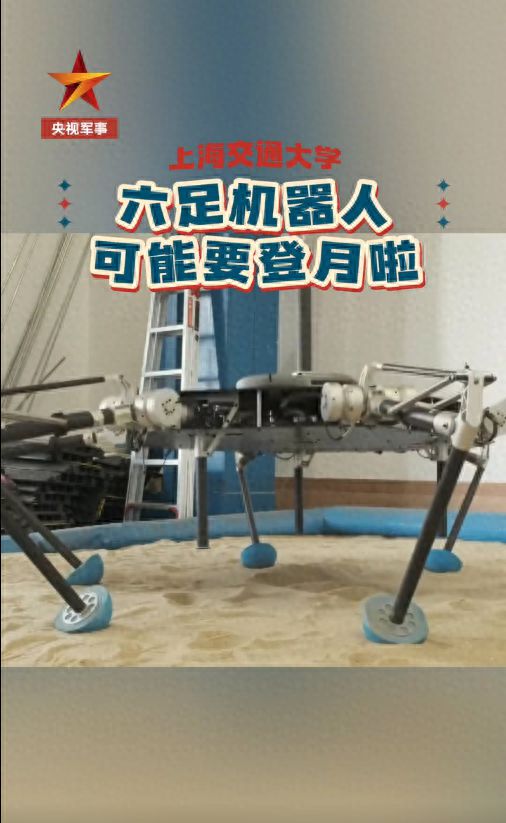
1、强大的地形适应能力:六足机器人的六条腿设计使其在地形复杂的月球表面依然能够稳定行走,无论是爬坡、跳跃还是跨越障碍,都能轻松应对。
2、高度智能化:六足机器人具备高度智能化的控制系统,能够实现自主导航、避障、规划路径等功能。

3、强大的续航能力:为了满足月球探测任务的需求,六足机器人拥有出色的续航能力,能够在月球表面长时间工作。
4、独特的自我修复能力:六足机器人的一项独特之处在于,即使一条腿受损,也能通过其他腿的支持继续行走,这一功能的实现,极大地提高了机器人在恶劣环境下的生存能力。
研发过程中的技术挑战
1、结构设计:为了满足六足机器人在月球表面的行走需求,科研团队需要解决复杂的结构设计问题,确保机器人能够在极端环境下保持稳定性和耐久性。
2、控制算法:高度智能化的控制系统是六足机器人的核心,研发过程中,科研团队需要解决复杂的控制算法问题,以实现机器人的自主导航、避障等功能。
3、自主修复技术:让机器人具备自我修复能力是一大挑战,科研团队需要通过技术创新,实现机器人在受损情况下仍能继续行走的能力。
六足机器人的应用领域
1、月球探测:六足机器人在月球探测领域具有广泛应用前景,可以协助人类完成月球表面的巡视、采样等工作。
2、地质灾害救援:六足机器人在地质灾害现场的应用也十分广泛,可以在复杂地形中执行搜救任务,为灾区救援提供有力支持。
3、极端环境探测:六足机器人还可以应用于极端环境的探测工作,如火山、冰川等难以到达的地区。
展望未来
随着科技的进步,六足机器人将在未来发挥越来越重要的作用,我国科研团队将继续深入研究,不断完善六足机器人的功能和技术,为未来的太空探索和地球探测任务做出更大贡献,随着技术的不断进步,六足机器人的应用领域也将更加广泛,为人类创造更多的价值。
六足登月机器人作为我国科技领域的一项重要成果,代表着人类对未来科技的无限憧憬,通过不断的研究和创新,我们有望见证更多科技奇迹的出现,共同开创一个更加美好的未来。








 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...