
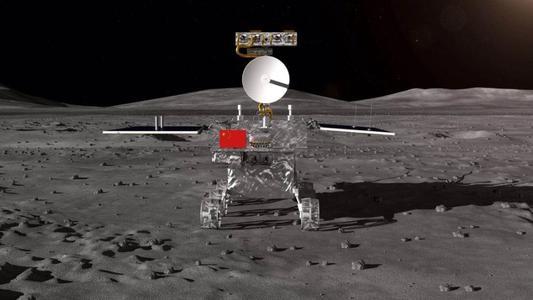
中国正在研发一款六足登月机器人,旨在成为太空探索的新利器。这款机器人具备高度自主性和智能化,能够在月球表面进行复杂任务,如地形勘测、样本采集等。该机器人的六足设计使其具有更强的适应性和机动性,能够在不平坦的月球表面稳定行走。这一研发项目标志着中国在太空科技领域的持续进步和创新,有望为未来的太空探索任务做出重要贡献。
本文目录导读:
随着科技的飞速发展,人类探索太空的步伐日益加快,作为太空探索的重要一环,登月机器人技术受到了广泛关注,有消息称中国正在研发一款六足登月机器人,这标志着中国在航天技术领域取得了重要突破,本文将详细介绍这款六足登月机器人的研发背景、技术特点、应用领域及未来展望。
研发背景
1、太空探索需求:随着人类对太空资源的开发与利用,登月任务逐渐成为太空探索的重要组成部分,为了完成复杂的登月任务,需要研发具有更高智能、更强适应性的机器人。
2、技术发展推动:随着机器人技术的不断进步,六足机器人凭借其高度灵活性和稳定性在各个领域得到了广泛应用,将其应用于登月任务,将有助于提高任务的完成效率和安全性。
3、中国航天事业发展:作为世界航天领域的重要力量,中国航天事业的发展迅速,研发六足登月机器人,有助于提升中国在国际航天竞争中的地位。
技术特点
1、六足设计:六足机器人具有较高的灵活性和稳定性,可在复杂地形环境下完成各种任务,在登月任务中,六足机器人可以适应月球表面的不平整地形,提高行动能力。

2、智能化:六足登月机器人具备高度智能化,包括自主导航、智能避障、自动采样等功能,还可以通过遥控操作进行精确控制,实现人机协同作业。
3、强大的载荷能力:六足机器人具有较强的载荷能力,可携带多种科学仪器和设备,完成月球勘探、资源开采等任务。
4、耐用性:六足登月机器人在极端环境下具有良好的耐用性,可在月球表面的真空、低温、强辐射等条件下长时间工作。
应用领域
1、月球勘探:六足登月机器人在月球勘探领域具有广泛应用,通过携带的科学仪器,可对月球表面进行地质勘测、资源勘探等,为人类的月球基地建设和深空探测提供重要数据支持。
2、资源开采:六足登月机器人在资源开采方面具有重要意义,利用强大的载荷能力,可开采月球上的氦-3等稀有资源,为地球能源开发提供新的途径。
3、月球科研:六足登月机器人还可用于月球科学实验,通过搭载实验室设备,进行月球土壤、岩石等样本的分析和研究,为月球科学研究提供便利。
4、月球基地建设:随着月球基地建设的推进,六足登月机器人在其中将发挥重要作用,它们可以帮助建设基础设施、运输物资、维护设备等,提高基地建设的效率。
未来展望
1、技术升级:随着研发的深入,六足登月机器人技术将得到进一步升级,我们将看到更加智能、更加强大的六足机器人出现在月球表面。

2、应用拓展:除了登月任务,六足机器人还可应用于其他太空领域,如火星探测、小行星探测等,六足机器人的应用领域将更加广泛。
3、国际合作:随着全球航天事业的快速发展,国际合作在航天领域的重要性日益凸显,中国可与其他国家开展六足登月机器人的联合研发,共同推动航天技术的发展。
中国正研发的六足登月机器人是航天技术领域的重要突破,它具有较高的灵活性和稳定性、智能化、强大的载荷能力以及良好的耐用性等特点,在月球勘探、资源开采、月球科研和月球基地建设等领域具有广泛应用,随着技术的升级和应用的拓展,六足登月机器人将成为太空探索的新利器。












 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...